Super Simple Gimbal
![]()
June 2014

| |
| It's Super Simple! |
Introduction
In my search for an ultralite 2 axis Gimbal for my TriHexaCop project, I came accross this idea from RCGroups poster "Crezzee". The thread can be found here: Super Simple Gimbal - SSG - KK2.1 & OpenPilot support. It's really an awesome idea in it's simplicity and some have been able to get the performance to be quite good.
So, the idea was to build this as close to Crezzee's original plan as possible and see if I couldn't get it to work well enough for video.
The Build
My TriHexaCop is built on an HK x900 platform so the need for a seconday servo mount board was covered by the frame plates. When finished, the gimbal pieces ended up weighing a total of 48gr with the Corona DS-929MG servos shown here and this would, by any measure, be considered "Ultralite".
The first thing I did was work out how I wanted to mount the servos and for this I choose some HK wing servo mounts using servo tape to hold them until I am satisfied with the results (more on that later). This type of servo mount will allow me to change servos pretty easily and they do a great job of keeping everything straight.

|
| Servo mounts |

|
| Corona DS929MG Shown |
The Gimbal Plate
The gimbal plate is the main part and it's design is important with respect to the geometry of the linkage and pivot points. My gimbal plate was copied from the Crezzee drawing with one modification, I added 5mm to the spacing of the servo link holes. This was to accommodate a pair of Hitec HS-81 servos I had. For information on how I cut this plate using simple tools and a simple layout technique you can see this in my article How To - Make Your Own G10 Parts.
If you would like a copy of my print on this part, here is the link:
PDF - SSG Plate DWG.PDF
JPG - SSG Layout
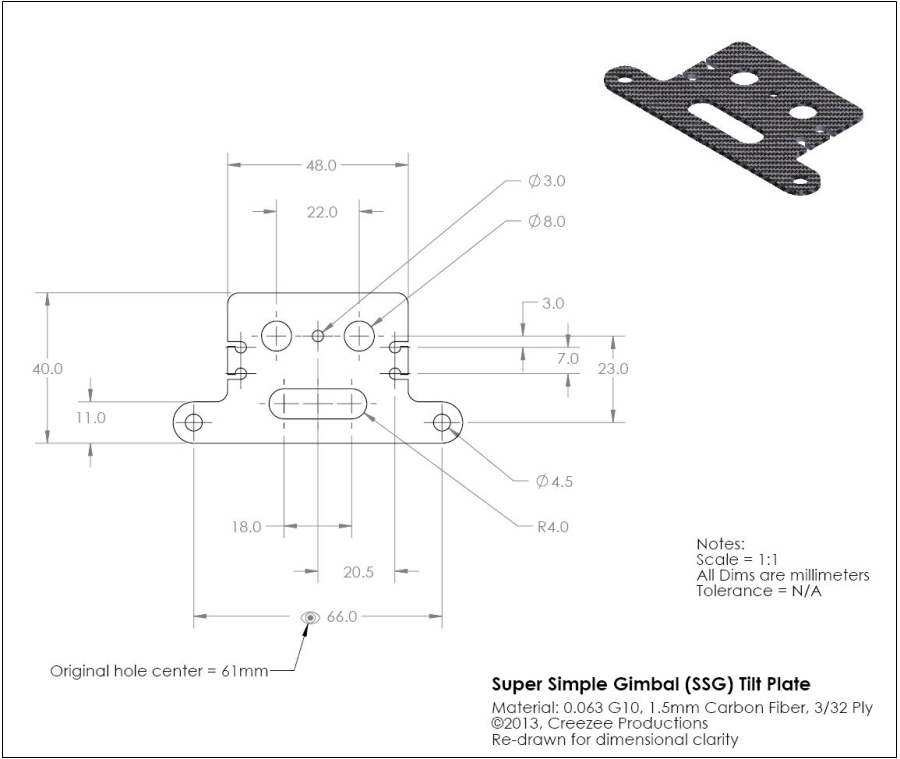{kind=link}

|
| The Crezzee Gimbal Plate |
Linkage
In Crezzee's original design he used fuel tubing for all the linkage and it looked like it worked well. When I started to get mine together, I decided to make a change because I couldn't get the consistent behavior I wanted. So, for mine, I used a small Dubro nylon clevis, a short piece of 2-56 threaded rod, a plastic 'T' bushing, a piece of silicone fuel tube and a very small shaft collar to hold it all together. With these parts I got very consistent linkage behavior and still had the high mis-alignment nature of using fuel tube.

|
| Hardware Bits Used |

|
| Gimbal Plate Assembly |

|
| Assembled Linkage Detail |
Front Pivot
The last part to put together was the front pivot. For this, I copied the original idea completely. It is very simple being made from a short piece of silicone fuel tube, two flat head 3mm x 5mm machine screws and two plastic wire ties. I did play around with the length of tube and found it should be as short as possible to keep the bend from getting too sloppy. I may try an RC Car universal joint at some point in the future.

|
| Front Detail |

|
| All Assembled |
Control
Crezzee's thread on RCGroups is covers the control using a KK board and a CC3D board as there is software that can be loaded to these boards with the proper mixes for this type of motion (which is the same mix as "Elevon"). In my case I have also tried using a "V-tail" mixer which is an add on component that should emulate the elevon mix.
KK2.0 Board
My first control attempt was to use a KK2.0 board but this was quickly discounted (for me) because I don't want to use it for flight control as I am using a Naza M controller and the KK board won't work without the ESC's connected.
Naza with V-tail Mixer
My second control set-up was to try the V-tail mixer with the gimbal control coming from the Naza controller. The result was not great because the servos I was trying, Hitec HS-81's would not stop fidgeting. I could tune it so the desired control motion was there but it would not sit still which would make for some horrible video. I then tried this set-up with a pair of Corona digital servos changing the Naza output to 400hz (I tried every output speed). This dramatically improved the magnitude of the jumpiness but it was still never sitting still.
CC3D Board
My third scenario was to try and use a CC3D board I had and this has been the best performer yet. The CC3D will operate the Gimbal output without being armed so it will in fact "stand alone" as a gimbal controller (kinda pricey though). It also delivers the signal at up to 400hz and was very easy to tune.
|
|
| Ready to test, showing the CC3D controller |
Video Sample
The following video is a comparison of the SSG gimbal and my standard Easy Brushless Gimbal. As you can see, there is still work to be done mainly in finding servos which will be more solid/less jittery. I have tried Hitec HS-81, Corona DS969MG and Bluebird D385Max servos and so far the Corona's work the best. I will try some more expensive Savox coreless digitals in the near future.
|
War of the Gimbals! |
See Also
Easy Brushless Gimbal
Brushless Gimbal Project
RCGroups